Gemi profili oluşturun veya yükleyin
Ana ekrandan profili açın. Yalnız onaylı gemi, hidrostatik, stabilite, tank ve kapasite verilerini girin. Değerlendirme için tam demo gemisini yükleyebilir; operasyon öncesi her kaynağı inceleyebilirsiniz.
Bu kılavuz güncel uygulamadaki en kısa emniyetli yolu gösterir. Seçenekler erişim düzeyi, kurulu paketler ve gemi verisine göre değişir.
Ana ekrandan profili açın. Yalnız onaylı gemi, hidrostatik, stabilite, tank ve kapasite verilerini girin. Değerlendirme için tam demo gemisini yükleyebilir; operasyon öncesi her kaynağı inceleyebilirsiniz.
Sefer veya şablon oluşturun; kalkış, varış ve waypoint ekleyin; mesafe/ETA'yı inceleyin ve güvenilir bağlantıyı terk etmeden uygun çevrimdışı harita paketini hazırlayın.
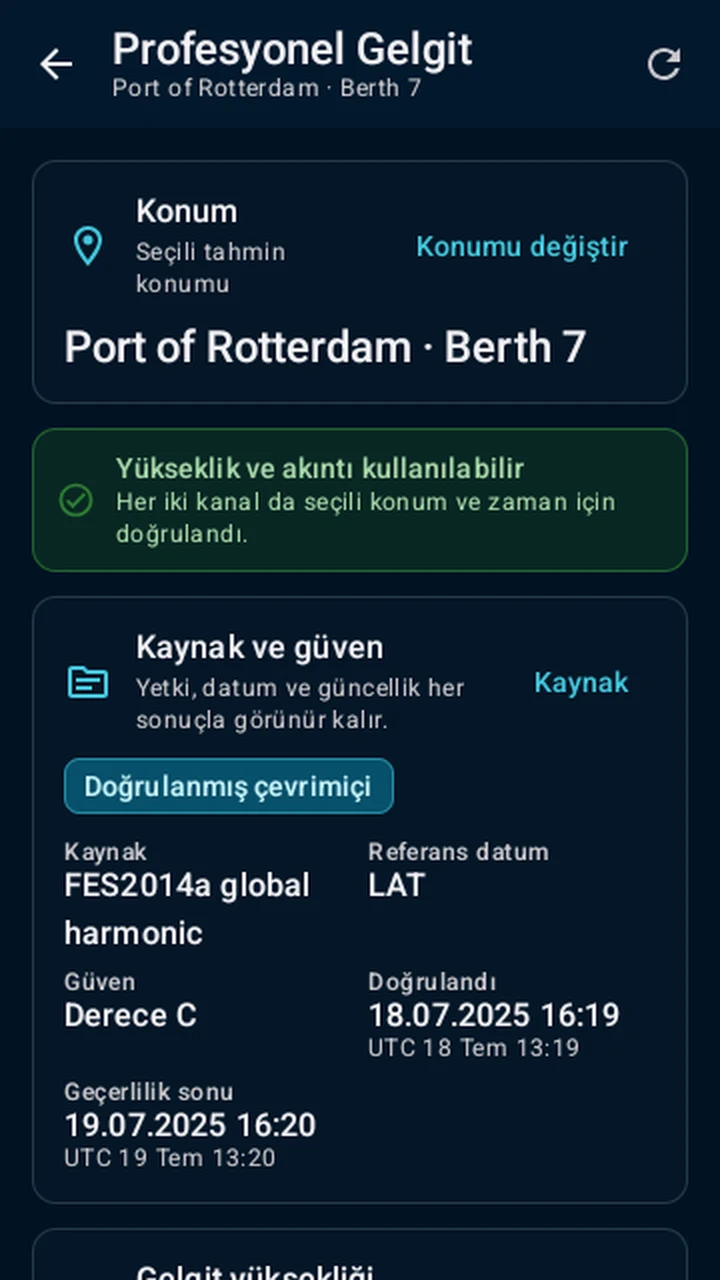
İstasyon veya koordinat seçin; kaynak, datum, güven ve geçerliliği doğrulayın. UKC için draft, squat ve emniyet paylarını girin; sonucu kaynak kanıtıyla kaydedin.
Tehlike, aciliyet veya emniyet akışını seçin; DSC çalışma sayfasını ve hazırlık kontrollerini tamamlayın, yetkili log kaydı oluşturun. Yayını sertifikalı cihaz ve onaylı prosedürle yapın.
Aktif gemi/koşulu seçin, ölçümleri dikkatle girin, doğrulama uyarılarını çözün, sonucu onaylı kriterlerle karşılaştırıp kaydedin. Demo verisini gerçek karara taşımayın.
UTC, DR mevkii, gök cismi ve sekstant girdileriyle gözlem oluşturun; düzeltmeleri uygulayıp LOP/fix üretin. Tekrarlı köprüüstü kontrolleri için hızlı hesaplayıcıları kullanın.
Records ekranında sefer, stabilite, draft, tank ve hesap geçmişini inceleyin. Yalnız desteklenen formatları dışa aktarın ve başka sistemde kullanmadan önce dosyayı kontrol edin.
Analitik kontrolleri Ayarlar'dadır. GDPR onayı yalnız hukuken gereken bölgelerde istenir; diğer bölgelerde kişiselleştirilmiş reklam varsayılan açıktır. Premium şifreli snapshot sunar, canlı senkron sunmaz.
Kaynak doğrulaması, erişim, konum veya gemi verisi eksikse uygulama işlemi sınırlar. Doğrulama için bağlantıyı sağlayın, izinleri ve kaynak geçerliliğini kontrol edip yeniden deneyin.
Bir sonucu operasyonda kullanmadan önce sağlayıcı, datum, zaman temeli, güven düzeyi ve kurulu paket kanıtını kontrol edin.
Çıktıya güvenmeden önce eksik, tutarsız veya sınır dışı gemi, konum ve hesap girdilerini düzeltin.
Birimleri, gemi bilgilerini, saat dilimini ve seçilen yöntemi girdiden kayıt veya dışa aktarmaya kadar görünür tutun.
Uyarılar inceleme gerektiren koşulları gösterir; engelleyici durumlar atlanmamalı, çözülmelidir.
CaptainCalc karar desteğidir. Onaylı gemi dokümanları, resmî yayınlar ve kaptanın değerlendirmesi esastır.
CaptainCalc karar desteğidir; onaylı stabilite verisinin, loading computer'ın, ECDIS'in, resmi yayınların, prosedürlerin veya kaptan kararının yerini almaz.